
Los humanos pueden reconocer objetos en su entorno y usarlos como herramientas, «intuitivamente». Un estudio realizado por los investigadores Tee Keng Peng (I2R ASTAR) y Ganesh Gowrishankar del Laboratorio de Ciencias de la Computación (Informática – contracción de información y automatización – es el campo…), Robótica y Microelectrónica de Montpellier (LIRMM – CNRS/Universidad de Montpellier) en el marco del proyecto (Un proyecto es un compromiso irreversible de resultado incierto, no reproducible a…) Jizai body project (JST-ERATO), está interesado en el desarrollo de esta capacidad en los robots, para hacerlos más innovador en escenarios impredecibles y no modelados.
Según los resultados de este estudio, los robots podrían, al igual que los humanos, basarse en los miembros de observación para identificar herramientas potenciales.
El uso de herramientas ha sido reconocido como una habilidad importante para los robots y ha sido objeto de mucha investigación. Sin embargo, el uso de herramientas siempre ha sido considerado como un problema de aprendizaje (aprendizaje es la adquisición de conocimientos, es decir, el proceso…) por parte de los especialistas en robótica y todos los agentes anteriores de robots que usaban herramientas tenían que trabajar con al menos algunas herramientas, u observar el uso de herramientas por parte de otros agentes, y aprender de ellos, para poder utilizar las propias herramientas.
Observar las posturas de las manos puede permitir a los humanos identificar objetos como herramientas.
Aquí, el equipo de investigación (Investigación científica designa en primer lugar todas las acciones emprendidas con vistas a…) se basó en los resultados de sus estudios previos realizados sobre el uso de herramientas humanas (Ganesh y al. Nat. Comm . 2014), encarnación (Aymerich Franch & Ganesh, Neurosci. Res. 2016) y caracterización de la herramienta (Una herramienta es un objeto finalizado utilizado por un ser vivo para aumentar su… .) humano (Tee et al. ICRA 2018). Estos llevaron al descubrimiento de que los humanos pueden usar sus propias extremidades para identificar objetos como herramientas para diversas tareas. Esto condujo al desarrollo de un marco teórico (marco) que permite a un robot (Un robot es un dispositivo mecatrónico (que combina mecánica, electrónica y…) sin ninguna experiencia en el uso de herramientas, identificar objetos como herramientas y usarlos sin que requiere aprendizaje.
«Nuestro algoritmo permite que los robots reconozcan y usen herramientas de inmediato en cualquier tarea que puedan realizar sin herramientas. Un robot puede identificar las características de «funcionalidad» de sus propias extremidades que permiten una tarea, usar esas características para reconocer un objeto como una herramienta potencial. para la misma tarea, luego desarrolle movimientos exitosos con la herramienta utilizando los controladores que ya tiene el robot”, explica Ganesh Gowrishankar.
Cognición de herramientas en robots.
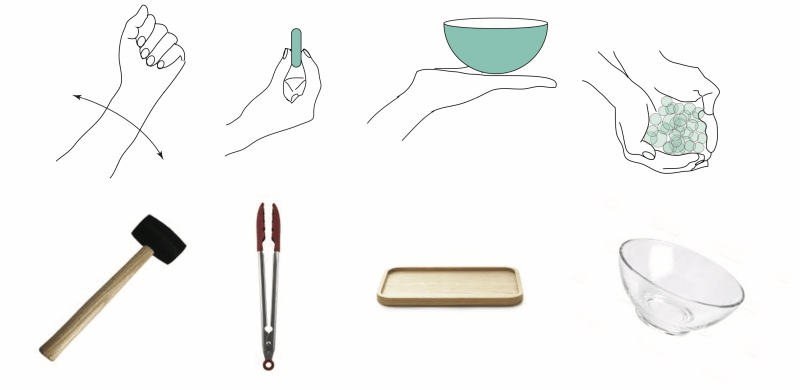
Este marco funciona para herramientas que permiten aumentos cinemáticos, es decir, extensiones de la forma y el tamaño (que se puede percibir visualmente) de nuestras extremidades. Estos incluyen un conjunto importante (En la teoría de conjuntos, un conjunto denota intuitivamente una colección…) de herramientas que usamos en la vida diaria: cucharas, rastrillos, tenazas, platos e incluso sillas (para escalar), etc. Pero existen otras herramientas que permiten aumentos de dinámica/fuerza (La palabra fuerza puede referirse al poder mecánico sobre las cosas, y también, metafóricamente, a…), por ejemplo martillos y palancas.
Future (Futurs es una colección de ciencia ficción de Éditions de l’Aurore.) El trabajo podría extender los resultados de este trabajo, para permitir que un robot use herramientas dinámicas y se integre con las técnicas disponibles para aprender a usar herramientas. Este próximo paso acercará a los robots a la capacidad versátil de los humanos para usar herramientas.
Publicación:
Tee, KP, Cheong, S., Li, J. et al. Un marco para la cognición de herramientas en robots sin aprendizaje u observación previa de herramientas. Nat Mach Intell 4, 533-543 (2022). https://doi.org/10.1038/s42256-022-00500-9
Contacto:
Ganesh Gowrishankar – CNRS Research Fellow (El Centro Nacional de Investigaciones Científicas, más conocido por sus siglas CNRS, es el más grande…) en LIRMM – ganesh.gowrishankar en lirmm.fr
¿Te ha gustado este artículo? ¿Quieres apoyarnos? Compártelo en las redes sociales con tus amigos y/o coméntalo, ¡esto nos animará a publicar más temas similares!